
The aim of the project is to design a light-weight, handy, small size device which would later be attached to the white cane. This attached device is meant to help the visually impaired people to detect overhanging obstacles and dips or potholes along the pathway.

Limitation of Current Walking Aids [1]
Ultrasonic techniques is adopted in this project. This is mainly because of its attractive feature in performing non-contact distance measurement effectively without any high demand in cost. After a thoroughly search of ultrasonics sensors, 400ST10O and 400RT10O have been chosen to accomplish the task. 400ST10O and 400RT10O are transmitter and receiver respectively.
Ultrasonics Transducer 400ST100/400RT100
This project could be divided into three stages: the transmitter, the receiver, and the feedback stage. Each of this stages involves the development in hardware and software.
In hardware development, investigation and study on a broad variety of ICs, regulators, resistors, capacitors, and diode are done. The combinations of these analogue devices are need to do particular tasks such as amplification, filtering, peak detection, and so on.
Software development is essential in the project as all the examinations are done according to some models drawn up for the ease of any developments. Therefore, software offers flexibility. Mitsubishi single-chip microcomputer, M16C/62, has been utilized here.
| Stages | Hardware | Software |
| Transmitter | Amplification | Generation of the driving pulse |
| Receiver | Extracting valuable message conveys in the reflected echo | Performing the time to distance computation |
| Feedback | Buzzer, vibration | Translating the distance into the necessary feedback |
So far the transmitter has been fully development both in hardware and software aspects. As for the receiver part, a initial draft hardwiring prototype that deals with the analogue received signal has been successfully built. It might need further refinement in future.
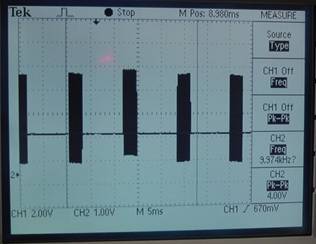
Figure 4:Driving pulse generated by the microcontroller |
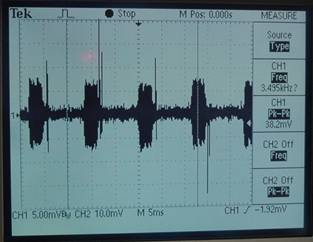
Figure 5: Received signal at the Ultrasonics receiver front end |
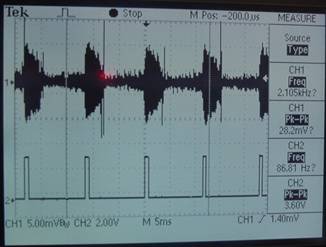
Figure 6: Comparison of the signal received at the receiver front end with the filtered echo pulses |
Figure 7: Time differences between the transmitter signal and the filtered echo pulses |
After passing through the received signal at the receiver front end to several different stages such as amplifying, filtering, and peak detection would result the filtered echo pulses.
[1] Wong, C (2001) Design of Ultrasonic Sensor for the White Cane Undergraduate thesis, School of Electrical and Computer Engineering, University of Technology Western Australia